yijuanzhi
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
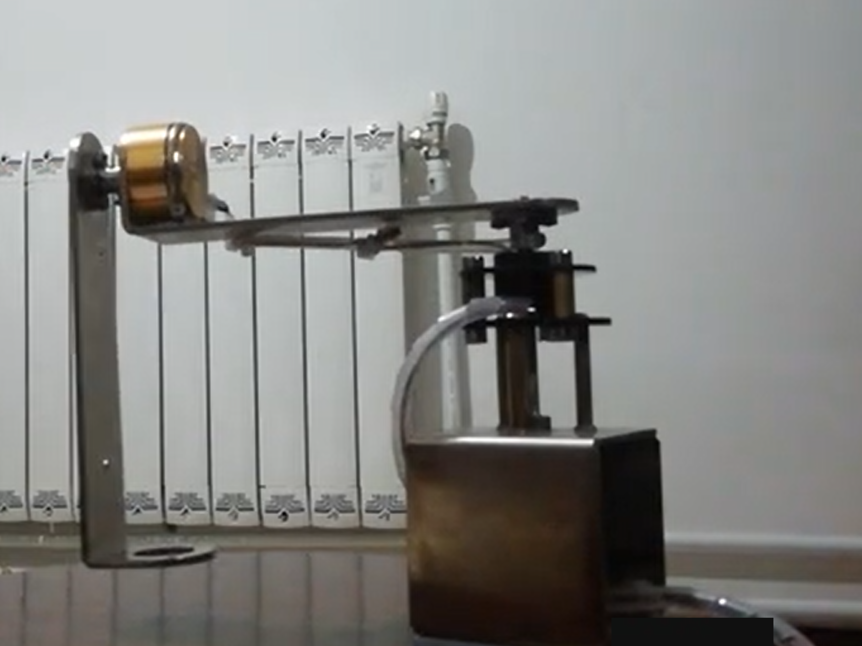
本设计基于RT-Thread操作系统,通过旋转倒立摆模型和双闭环PID控制算法,实现了对机器人的稳定控制。硬件方面采用了ART-PI开发平台,主控芯片为STM32H750,核心动力驱动为TB6612芯片,速度和角度采集使用霍尔传感器和高精度电位器。软件方面使用了RT-Thread 4.0.2版本作为操作系统,并编写了双闭环PID控制算法。通过该设计,成功实现了对机器人在空间中稳定运动姿态的控制,提高了开发效率。
解决方案:
本设计基于嵌入式操作系统RT-Thread,针对机器人运动系统的控制问题,提出了一种基于旋转倒立摆模型的控制算法。该算法通过速度闭环控制和角度闭环控制实现对机器人在空间中稳定运动姿态的控制。
在硬件方面,本设计采用了ART-PI开发平台作为硬件基础,主控芯片采用STM32H750高性能单片机,核心动力驱动采用TB6612芯片,速度采集使用霍尔传感器,角度采集使用高精度电位器,参数显示和实时调整使用OLED屏幕。
在软件方面,本设计使用了RT-Thread 4.0.2版本作为操作系统,并利用其全内核、FinSH控制台交互、SPI驱动、ADC驱动、编码器驱动、PWM驱动等系统驱动功能。同时,还编写了双闭环PID控制算法来实现对旋转倒立摆的稳定控制。
在PID算法的实现上,针对倒立摆的运动特点进行了优化和调整。PID控制器是一种经典的控制器,结构简单、稳定性好、调整方便,被广泛应用于工业控制领域。本设计中的PID控制器包括比例、积分和微分三个部分,通过调节这三个部分的参数,可以实现对系统的稳定控制。
通过以上的设计和实现,本项目成功实现了对机器人在空间中稳定运动姿态的控制。在开发过程中,利用RT-Thread操作系统的内核管理、调试交互和驱动设计等功能,减少了开发时间和调试困难,提高了开发效率。
总结来说,本设计基于RT-Thread操作系统,通过旋转倒立摆模型和双闭环PID控制算法,实现了对机器人的稳定控制。该设计在硬件和软件方面都有详细的说明和实现,为机器人控制领域的研究和应用提供了有益的参考。
本设计基于嵌入式操作系统RT-Thread,针对机器人运动系统的控制问题,提出了一种基于旋转倒立摆模型的控制算法。该算法通过速度闭环控制和角度闭环控制实现对机器人在空间中稳定运动姿态的控制。
在硬件方面,本设计采用了ART-PI开发平台作为硬件基础,主控芯片采用STM32H750高性能单片机,核心动力驱动采用TB6612芯片,速度采集使用霍尔传感器,角度采集使用高精度电位器,参数显示和实时调整使用OLED屏幕。
在软件方面,本设计使用了RT-Thread 4.0.2版本作为操作系统,并利用其全内核、FinSH控制台交互、SPI驱动、ADC驱动、编码器驱动、PWM驱动等系统驱动功能。同时,还编写了双闭环PID控制算法来实现对旋转倒立摆的稳定控制。
在PID算法的实现上,针对倒立摆的运动特点进行了优化和调整。PID控制器是一种经典的控制器,结构简单、稳定性好、调整方便,被广泛应用于工业控制领域。本设计中的PID控制器包括比例、积分和微分三个部分,通过调节这三个部分的参数,可以实现对系统的稳定控制。
通过以上的设计和实现,本项目成功实现了对机器人在空间中稳定运动姿态的控制。在开发过程中,利用RT-Thread操作系统的内核管理、调试交互和驱动设计等功能,减少了开发时间和调试困难,提高了开发效率。
总结来说,本设计基于RT-Thread操作系统,通过旋转倒立摆模型和双闭环PID控制算法,实现了对机器人的稳定控制。该设计在硬件和软件方面都有详细的说明和实现,为机器人控制领域的研究和应用提供了有益的参考。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
yijuanzhi
所在区域: 全国
Yijuanzhi是一家专注于单片机和其他领域的公司。我们拥有一支技术精湛的团队,擅长于开发和应用单片机技术。我们的产品和解决方案广泛应用于各个行业,为客户提供高效、可靠的解决方案。
我们的核心能力在于嵌入式系统开发和设计。我们深入研究了嵌入式操作系统,并开发了基于嵌入式操作系统的机器人欠驱动控制模型算法。这一算法通过优化机器人的运动控制,实现了更加精准和高效的控制效果。我们的解决方案已经在多个项目中得到了成功应用。
作为一家技术驱动的公司,我们不仅仅提供产品和解决方案,还致力于为客户提供全方位的技术支持和服务。我们的团队具备丰富的经验和专业知识,能够根据客户的需求定制化开发,并提供及时的技术支持。
我们的客户遍布各个行业,包括工业自动化、智能家居、物联网等。我们的产品和解决方案已经在多个项目中得到了验证,并取得了显著的成果。我们将继续努力创新,为客户提供更好的产品和服务。
如果您对我们的公司和产品感兴趣,欢迎随时联系我们,我们将竭诚为您提供帮助和支持。