fanyun896
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
该六自由度双足机器人设计具备结构简单、功能丰富的特点。它不仅可以完成基本的步行动作,还可以进行更加复杂的动作表演。这对于机器人研究领域的发展具有重要意义,为设计自主智能双足步行机器人打下了基础。
解决方案:
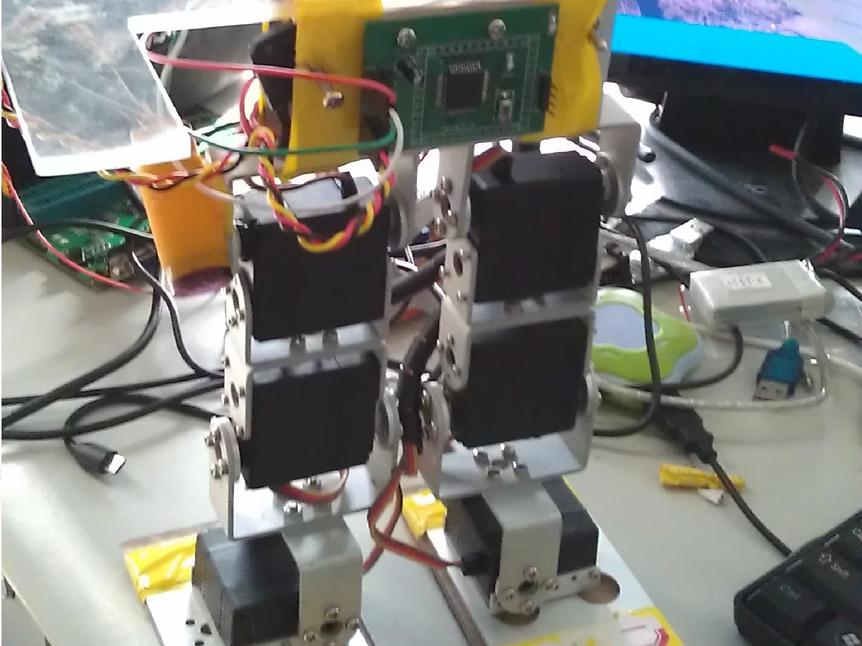
该六自由度双足机器人设计旨在实现多种功能,包括直立、行走、卧倒、翻滚和原地旋转等动作。它由机械结构、舵机控制模块和主控核心上位机组成。
在硬件设计方面,该机器人采用了SLH89F5162单片机作为主控芯片。机械结构经过精心设计,采用了加藤一郎结构,并配置了6个自由度的下肢关节。这样的设计使得机器人能够模拟人类下肢关节的运动,并具备较高的灵活性和稳定性。
舵机控制模块是机器人的关键部件之一,它负责控制机器人的各个关节进行运动。通过精确的控制舵机的角度和速度,机器人能够完成各种复杂的动作。主控板与红外对管的设计则提供了机器人与外部环境进行通信和感知的能力。
在软件设计方面,机器人的运动控制和动作规划是关键。通过编写合适的程序源码,结合传感器数据的反馈,机器人能够实现自主的步行和动作控制。软件设计框图展示了机器人的整体架构和各个模块之间的关系。
总之,该六自由度双足机器人设计具备结构简单、功能丰富的特点。它不仅可以完成基本的步行动作,还可以进行更加复杂的动作表演。这对于机器人研究领域的发展具有重要意义,为设计自主智能双足步行机器人打下了基础。
该六自由度双足机器人设计旨在实现多种功能,包括直立、行走、卧倒、翻滚和原地旋转等动作。它由机械结构、舵机控制模块和主控核心上位机组成。
在硬件设计方面,该机器人采用了SLH89F5162单片机作为主控芯片。机械结构经过精心设计,采用了加藤一郎结构,并配置了6个自由度的下肢关节。这样的设计使得机器人能够模拟人类下肢关节的运动,并具备较高的灵活性和稳定性。
舵机控制模块是机器人的关键部件之一,它负责控制机器人的各个关节进行运动。通过精确的控制舵机的角度和速度,机器人能够完成各种复杂的动作。主控板与红外对管的设计则提供了机器人与外部环境进行通信和感知的能力。
在软件设计方面,机器人的运动控制和动作规划是关键。通过编写合适的程序源码,结合传感器数据的反馈,机器人能够实现自主的步行和动作控制。软件设计框图展示了机器人的整体架构和各个模块之间的关系。
总之,该六自由度双足机器人设计具备结构简单、功能丰富的特点。它不仅可以完成基本的步行动作,还可以进行更加复杂的动作表演。这对于机器人研究领域的发展具有重要意义,为设计自主智能双足步行机器人打下了基础。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
fanyun896
所在区域: 全国
公司简介:
fanyun896是一家专注于传感器、物联网、机器人、嵌入式、智能家电等领域的科技公司。我们拥有丰富的经验和专业的技术团队,致力于为客户提供高质量的产品和解决方案。
我们的产品涵盖了多个领域,包括传感器、蓝牙模块、智能家居控制、土壤监测等。我们的解决方案包括基于微控制器的自动键控器、全自动家庭水培系统Green Box、乒乓球球发球机、远程宠物喂食器等,旨在为客户提供便捷、智能的生活体验。
我们的团队拥有丰富的经验和专业知识,能够为客户提供定制化的解决方案。我们注重技术创新和产品质量,不断推出具有竞争力的产品和解决方案。
我们的目标是通过技术创新和优质服务,为客户提供最佳的解决方案,帮助他们实现业务增长和效率提升。我们期待与您合作,共同开创美好的未来。