xxubomo
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
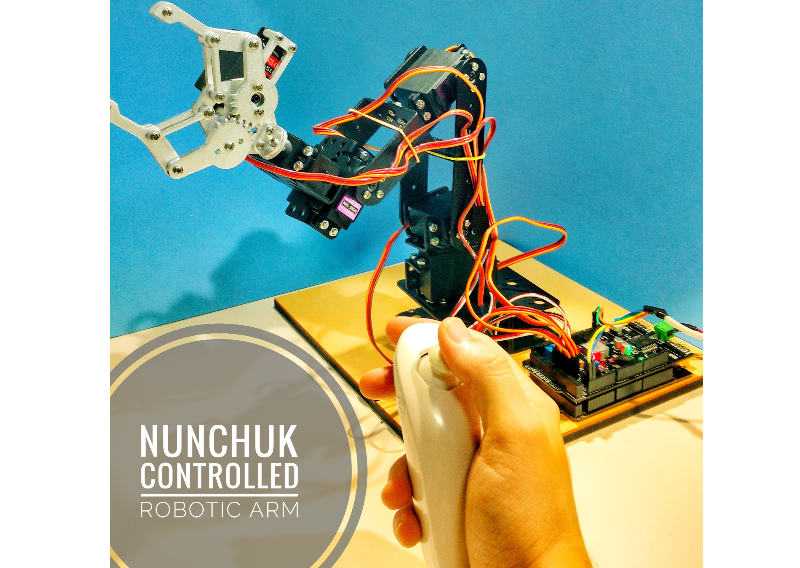
通过准备工具和材料,组装机器人手臂,连接Nunchuk控制器,编程Arduino Mega,测试和调试,您可以设计一个基于Nunchuk控制的机器人手臂,并使用Arduino Mega进行编程。这个低成本的项目可以帮助您学习机器人控制和编程,并提供一个实用的机器人手臂解决方案。详细的组装过程和更多信息,请参考附件中的说明书。
我们可以通过以下步骤来设计一个基于Nunchuk控制的机器人手臂,并使用Arduino Mega进行编程:
1. 准备工具和材料:您需要烙铁和电线来连接Nunchuk到Arduino,收缩管用于隔离导线,螺丝刀用于安装结构,6轴机械桌面机器人手臂套件,12V电源,Nunchuk控制器,公接线和Arduino Mega。
2. 组装机器人手臂:按照套件提供的说明书,将机器人手臂的各个组件进行组装。这个套件通常包括Arduino Mega 2560 R3、控制板屏蔽、NRF24L01+无线收发器模块、MPU6050 3轴陀螺仪和3轴加速度计、螺丝和螺母等。
3. 连接Nunchuk控制器:使用烙铁将一些端子焊接到Nunchuk的电线上,然后使用收缩管隔离导线。将Nunchuk控制器连接到Arduino Mega。
4. 编程Arduino Mega:使用Arduino IDE或其他编程软件,编写程序来控制机器人手臂。您可以使用Nunchuk控制器的传感器数据来控制机器人手臂的运动。
5. 测试和调试:将机器人手臂连接到电源,并使用Nunchuk控制器来测试机器人手臂的运动。如果有需要,您可以调整程序或机械结构来优化机器人手臂的性能。
通过以上步骤,您可以设计一个基于Nunchuk控制的机器人手臂,并使用Arduino Mega进行编程。这个项目不仅可以帮助您学习机器人控制和编程,还可以为您提供一个低成本的机器人手臂解决方案。详细的组装过程和更多信息,请参考附件中的说明书。
1. 准备工具和材料:您需要烙铁和电线来连接Nunchuk到Arduino,收缩管用于隔离导线,螺丝刀用于安装结构,6轴机械桌面机器人手臂套件,12V电源,Nunchuk控制器,公接线和Arduino Mega。
2. 组装机器人手臂:按照套件提供的说明书,将机器人手臂的各个组件进行组装。这个套件通常包括Arduino Mega 2560 R3、控制板屏蔽、NRF24L01+无线收发器模块、MPU6050 3轴陀螺仪和3轴加速度计、螺丝和螺母等。
3. 连接Nunchuk控制器:使用烙铁将一些端子焊接到Nunchuk的电线上,然后使用收缩管隔离导线。将Nunchuk控制器连接到Arduino Mega。
4. 编程Arduino Mega:使用Arduino IDE或其他编程软件,编写程序来控制机器人手臂。您可以使用Nunchuk控制器的传感器数据来控制机器人手臂的运动。
5. 测试和调试:将机器人手臂连接到电源,并使用Nunchuk控制器来测试机器人手臂的运动。如果有需要,您可以调整程序或机械结构来优化机器人手臂的性能。
通过以上步骤,您可以设计一个基于Nunchuk控制的机器人手臂,并使用Arduino Mega进行编程。这个项目不仅可以帮助您学习机器人控制和编程,还可以为您提供一个低成本的机器人手臂解决方案。详细的组装过程和更多信息,请参考附件中的说明书。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
xxubomo
所在区域: 全国
xxubomo是一家专注于工业领域的公司,擅长于stc12单片机、机器人、互联网、传感器等领域。我们提供多种解决方案,包括开源的STM32-ESC32无刷电调设计、微信控制家庭智能小管家机器人、单片机仿真等。我们的产品涵盖了颜色传感器、无线通信、智能家居控制等多个领域。我们的解决方案和产品已经在多个案例中得到了成功应用,例如备战电赛、PID控制风力摆控制系统设计、电池容量测试仪等。我们致力于为客户提供高质量的工业解决方案,帮助他们实现自动化控制、流量监测、工业安全等目标。无论是在传感器技术、单片机应用还是智能家居领域,xxubomo都是您可靠的合作伙伴。