Kevin丶
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
飞思卡尔第十三届KEA128单片机对MPU6050的DMP驱动解决方案包括硬件连接、寄存器配置、数据读取、数据处理、姿态解算和数据输出等步骤。通过这些步骤,可以实现对MPU6050传感器的驱动,提供可靠的姿态感知和运动控制解决方案,适用于工业领域等应用。
解决方案:
为了实现飞思卡尔第十三届KEA128单片机对MPU6050的DMP驱动,我们可以采取以下步骤:
1. 硬件连接:首先,将MPU6050传感器与KEA128单片机进行正确的硬件连接。确保连接正确无误,包括电源、地线和I2C通信线路。
2. 寄存器配置:在KEA128单片机上,使用I2C总线与MPU6050进行通信。通过写入和读取MPU6050的寄存器,配置传感器的工作模式和采样率等参数。
3. 数据读取:使用I2C总线从MPU6050读取加速度计和陀螺仪的原始数据。根据需要,可以选择读取三轴加速度和三轴角速度。
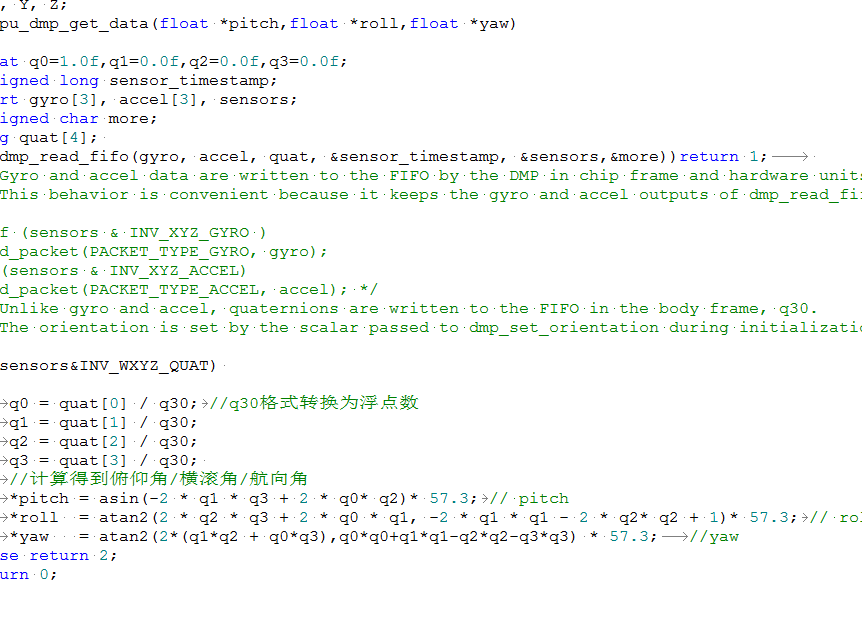
4. 数据处理:对于DMP驱动,可以使用MPU6050内部的数字运动处理器来处理原始数据。这样可以减轻主控单元的负担,并提供更精确的姿态解算和运动跟踪。
5. 姿态解算:通过DMP驱动,可以实现姿态解算,即根据加速度计和陀螺仪的数据计算出物体的姿态角度。这对于飞行器、机器人和虚拟现实等应用非常重要。
6. 数据输出:将姿态角度等数据输出到KEA128单片机的其他模块或外部设备,以实现相应的功能。可以通过串口、SPI或其他通信接口将数据发送给其他设备。
通过以上步骤,我们可以成功实现飞思卡尔第十三届KEA128单片机对MPU6050的DMP驱动。这将为工业领域的姿态感知和运动控制提供可靠的解决方案。
为了实现飞思卡尔第十三届KEA128单片机对MPU6050的DMP驱动,我们可以采取以下步骤:
1. 硬件连接:首先,将MPU6050传感器与KEA128单片机进行正确的硬件连接。确保连接正确无误,包括电源、地线和I2C通信线路。
2. 寄存器配置:在KEA128单片机上,使用I2C总线与MPU6050进行通信。通过写入和读取MPU6050的寄存器,配置传感器的工作模式和采样率等参数。
3. 数据读取:使用I2C总线从MPU6050读取加速度计和陀螺仪的原始数据。根据需要,可以选择读取三轴加速度和三轴角速度。
4. 数据处理:对于DMP驱动,可以使用MPU6050内部的数字运动处理器来处理原始数据。这样可以减轻主控单元的负担,并提供更精确的姿态解算和运动跟踪。
5. 姿态解算:通过DMP驱动,可以实现姿态解算,即根据加速度计和陀螺仪的数据计算出物体的姿态角度。这对于飞行器、机器人和虚拟现实等应用非常重要。
6. 数据输出:将姿态角度等数据输出到KEA128单片机的其他模块或外部设备,以实现相应的功能。可以通过串口、SPI或其他通信接口将数据发送给其他设备。
通过以上步骤,我们可以成功实现飞思卡尔第十三届KEA128单片机对MPU6050的DMP驱动。这将为工业领域的姿态感知和运动控制提供可靠的解决方案。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
Kevin丶
所在区域: 全国
Kevin丶是一家专注于工业领域的技术公司。我们擅长单片机、视觉识别、vl53l0x、stm32f767等技术领域。我们提供多种解决方案,包括飞思卡尔第十三届KEA128 MPU6050的DMP驱动、匿名飞控-拓空者-原理图/PCB、UWB dwm1000室内定位原理图+PCB、STM32光流软硬件资料、正点原子战舰V3原理图+PCB、AD版本-OPENMV3摄像头硬件设计附原理图/PCB源文件、两轮平衡小车集成化主控板原理图+PCB+程序源码等。我们拥有丰富的经验和专业的团队,致力于为客户提供高质量的技术解决方案。无论是产品开发还是技术支持,我们都能够满足客户的需求。如果您需要在工业领域寻求技术合作伙伴,Kevin丶将是您的不二选择。