ssolenoidd
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
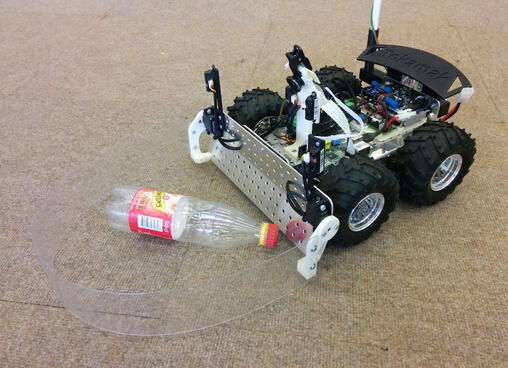
该基于树莓派的环保“捡垃圾”机器人小车控制平台是一个智能机器人系统,具备避障和锁定障碍物功能。系统利用Arduino控制移动,树莓派作为硬件主体。通过红外传感器和摄像头,系统能够识别塑料瓶并将其送到回收位置。此外,系统还支持其他物体的识别。附件提供了功能模块的原理图、源代码和测试程序,以及机器人小车和功能模块的3D模型。该平台实现了自动化垃圾收集和分类,提高了垃圾处理效率和环境保护水平。
解决方案:
基于树莓派的环保“捡垃圾”机器人小车控制平台是一个具有避障和锁定障碍物功能的智能机器人系统。该系统的核心是利用Arduino控制整个平台的移动,而机器人小车的硬件主体是树莓派。树莓派上的软件代码使用Python语言编写,可以轻松地与C/C++制作的模块进行联结。
在工作过程中,机器人小车上安装了4个红外传感器和一个树莓派摄像头。树莓派运行的Python脚本能够识别摄像头中出现的物体是否是塑料瓶。如果不是塑料瓶,系统会自动避开。如果识别到塑料瓶,Python脚本会将塑料瓶的位置信息传送给Arduino系统,并发出指令,控制平台上的“抓斗”锁定塑料瓶。然后,机器人小车会将塑料瓶送到指定的回收位置。
除了识别塑料瓶,Python脚本还可以根据需要进行其他物体的识别。整个系统的外接功能模块原理图和PCB设计可以使用Eagle软件打开,各功能模块的源代码和测试程序也提供了附件。此外,机器人小车和外接功能模块的3D模型可以使用SolidWorks软件打开。
通过这个基于树莓派的环保“捡垃圾”机器人小车控制平台,可以实现自动化的垃圾收集和分类,提高垃圾处理的效率和环境保护的水平。
基于树莓派的环保“捡垃圾”机器人小车控制平台是一个具有避障和锁定障碍物功能的智能机器人系统。该系统的核心是利用Arduino控制整个平台的移动,而机器人小车的硬件主体是树莓派。树莓派上的软件代码使用Python语言编写,可以轻松地与C/C++制作的模块进行联结。
在工作过程中,机器人小车上安装了4个红外传感器和一个树莓派摄像头。树莓派运行的Python脚本能够识别摄像头中出现的物体是否是塑料瓶。如果不是塑料瓶,系统会自动避开。如果识别到塑料瓶,Python脚本会将塑料瓶的位置信息传送给Arduino系统,并发出指令,控制平台上的“抓斗”锁定塑料瓶。然后,机器人小车会将塑料瓶送到指定的回收位置。
除了识别塑料瓶,Python脚本还可以根据需要进行其他物体的识别。整个系统的外接功能模块原理图和PCB设计可以使用Eagle软件打开,各功能模块的源代码和测试程序也提供了附件。此外,机器人小车和外接功能模块的3D模型可以使用SolidWorks软件打开。
通过这个基于树莓派的环保“捡垃圾”机器人小车控制平台,可以实现自动化的垃圾收集和分类,提高垃圾处理的效率和环境保护的水平。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
ssolenoidd
所在区域: 全国
ssolenoidd是一家专注于工业领域的公司。我们擅长于firepick、机器人小车、工业安全等领域。我们的产品和解决方案旨在提供高效、智能的工业解决方案。
我们的3D打印机不仅可以打印物体,还可以用于焊接芯片。这项技术的应用使得生产过程更加高效,节省了时间和人力成本。
此外,我们还开发了基于树莓派的环保“捡垃圾”机器人小车。该机器人小车具备避障、摄像、红外、WIFI等功能,能够自动巡航并收集垃圾。它不仅提高了垃圾清理的效率,还减少了人工操作的风险。
我们的解决方案已经在多个工业领域得到了成功应用。我们的客户包括制造业、物流业、仓储业等。我们致力于为客户提供创新的解决方案,帮助他们提高生产效率、降低成本、提升竞争力。
ssolenoidd将继续致力于工业领域的创新和发展,为客户提供更好的产品和解决方案。我们的团队拥有丰富的经验和专业知识,将竭诚为客户提供优质的服务。