皓月当空-2030966
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
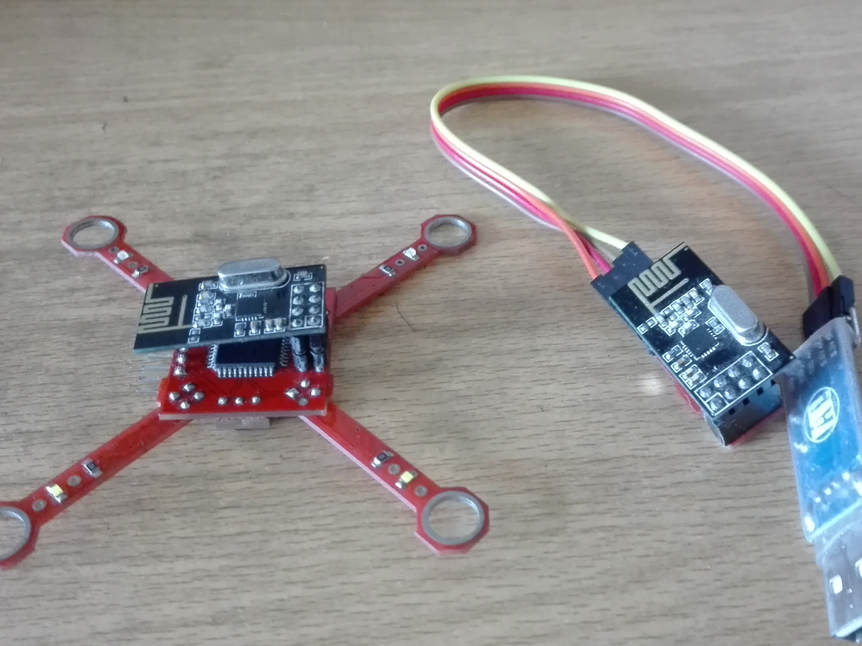
我们基于NRF24L01与MPU6050的2.4G无线姿态解算功能设计的解决方案,使用STC15L2K60S2单片机和MPU6050设计电路模块作为传感器,通过四元数算法实现姿态解算功能。同时,采用NRF24L01实现2.4G双向无线通信,将姿态信息传输到上位机并显示。此外,还设计了电池电压采集电路,实时监测电池电压。尽管四轴飞行器尚未完全设计完成,但硬件部分已经可正常工作。该解决方案为四轴飞行器开发提供了基础。
我们基于NRF24L01与MPU6050的2.4G无线姿态解算功能设计的解决方案如下:
我们使用STC15L2K60S2单片机进行开发,并采用六轴陀螺仪加速度计MPU6050设计电路模块作为传感器。通过四元数算法实现姿态解算功能,可以实时获取飞行器的姿态信息。
同时,我们采用NRF24L01实现了2.4G双向无线通信电路设计模块,可以实现与上位机的无线通信。这样,飞行器的姿态信息可以通过无线方式传输到上位机,并在上位机显示模块上显示出来。
此外,我们还设计了片上AD电池电压采集电路,可以实时监测飞行器电池的电压情况。
需要注意的是,目前该四轴飞行器还没有完全设计完成,PWM和PID控制等部分尚未起作用。但是硬件设计部分已经完成,可以正常工作。
以下是匿名四轴飞行器上位机的截图,可以看到上位机显示了飞行器的姿态、三轴角速度和三加速度等信息。
[插入上位机截图]
通过以上的解决方案,我们可以实现基于NRF24L01与MPU6050的2.4G无线姿态解算功能设计,为四轴飞行器的开发提供了基础。
我们使用STC15L2K60S2单片机进行开发,并采用六轴陀螺仪加速度计MPU6050设计电路模块作为传感器。通过四元数算法实现姿态解算功能,可以实时获取飞行器的姿态信息。
同时,我们采用NRF24L01实现了2.4G双向无线通信电路设计模块,可以实现与上位机的无线通信。这样,飞行器的姿态信息可以通过无线方式传输到上位机,并在上位机显示模块上显示出来。
此外,我们还设计了片上AD电池电压采集电路,可以实时监测飞行器电池的电压情况。
需要注意的是,目前该四轴飞行器还没有完全设计完成,PWM和PID控制等部分尚未起作用。但是硬件设计部分已经完成,可以正常工作。
以下是匿名四轴飞行器上位机的截图,可以看到上位机显示了飞行器的姿态、三轴角速度和三加速度等信息。
[插入上位机截图]
通过以上的解决方案,我们可以实现基于NRF24L01与MPU6050的2.4G无线姿态解算功能设计,为四轴飞行器的开发提供了基础。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
皓月当空-2030966
所在区域: 全国
皓月当空-2030966是一家专注于工业领域的技术公司。我们擅长于usb通信、51单片机、H型四轴飞行器、无线通讯模块电路等领域。我们的团队拥有丰富的经验和专业知识,致力于为客户提供高质量的解决方案。
我们的产品包括基于STM32的H型微型四轴飞行器,提供完整的硬件、源代码和文档,让客户能够快速搭建自己的四轴飞行器。我们还开发了STM32_USB_bulk传输方案,基于libusb-win32,实现了极速250kByte/s的数据传输速度。
此外,我们还提供了EasyTrace颜色跟踪在VC上的移植、步进电机上位机控制、STM32虚拟串口+BMP180气压温度海拔计+开源串口示波器上位机等解决方案,满足客户在工业领域的各种需求。
我们的案例包括基于NRF24L01与MPU6050的2.4G无线姿态解算功能设计,虽然是未完成的四轴飞行器,但展示了我们在无线通信和姿态解算方面的技术实力。
皓月当空-2030966致力于为客户提供创新的解决方案,帮助他们在工业领域取得成功。我们的团队将继续努力,不断提升技术水平,为客户提供更好的产品和服务。