udd4479
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
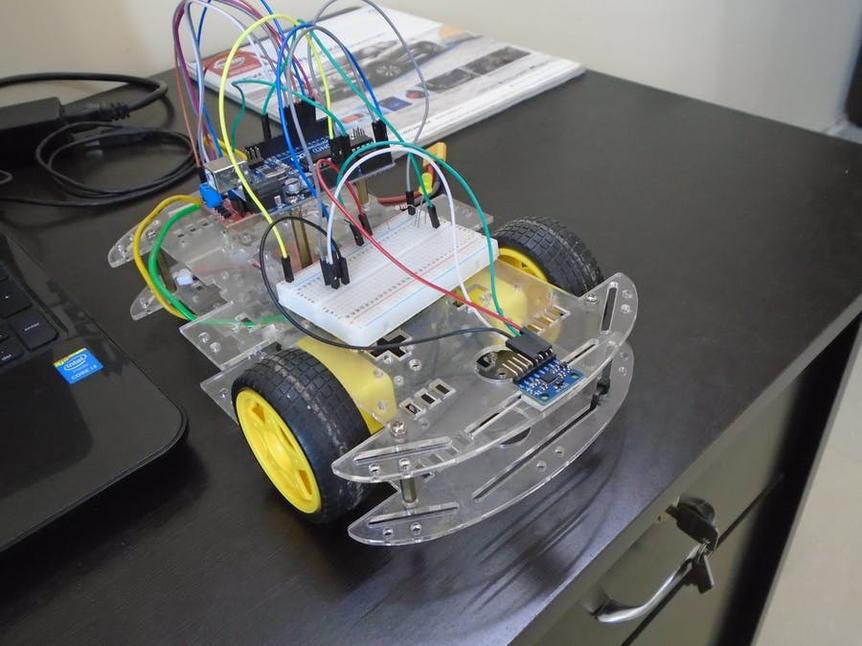
使用MPU6050 IMU和Arduino机器人可以实现一个简单而有趣的项目。通过获取陀螺仪的数据并将其用于控制机器人的运动,你可以轻松地进行操作并为自己省去很多麻烦。希望这个解决方案对你有帮助!
对于使用MPU6050 IMU和Arduino机器人的简单项目,以下是一个解决方案:
首先,确保你已经正确连接了MPU6050 IMU和Arduino板。你可以参考MPU6050的数据手册和Arduino的文档来了解如何正确连接它们。
接下来,你需要编写Arduino代码来读取MPU6050的数据。你可以使用Arduino的Wire库来与MPU6050进行通信,并使用MPU6050库来解析和获取陀螺仪的数据。在代码中,你可以使用Wire.begin()函数来初始化I2C通信,然后使用MPU6050.initialize()函数来初始化MPU6050。之后,你可以使用MPU6050.getRotationX()、MPU6050.getRotationY()和MPU6050.getRotationZ()函数来获取陀螺仪的偏航、俯仰和横滚值。
一旦你成功获取了陀螺仪的数据,你可以将其用于你的机器人项目中。例如,你可以根据陀螺仪的偏航值来控制机器人的方向,根据俯仰值来控制机器人的倾斜角度,根据横滚值来控制机器人的平衡。
在你的项目中,你可以使用Arduino的PWM输出来控制机器人的电机或舵机。根据陀螺仪的数据,你可以调整PWM输出的占空比,以实现所需的运动控制。
此外,你还可以使用其他传感器和模块来增强你的机器人项目。例如,你可以添加超声波传感器来实现避障功能,添加红外线传感器来实现跟随功能,或者添加无线通信模块来实现远程控制。
总结起来,使用MPU6050 IMU和Arduino机器人可以实现一个简单而有趣的项目。通过获取陀螺仪的数据并将其用于控制机器人的运动,你可以轻松地进行操作并为自己省去很多麻烦。希望这个解决方案对你有帮助!
首先,确保你已经正确连接了MPU6050 IMU和Arduino板。你可以参考MPU6050的数据手册和Arduino的文档来了解如何正确连接它们。
接下来,你需要编写Arduino代码来读取MPU6050的数据。你可以使用Arduino的Wire库来与MPU6050进行通信,并使用MPU6050库来解析和获取陀螺仪的数据。在代码中,你可以使用Wire.begin()函数来初始化I2C通信,然后使用MPU6050.initialize()函数来初始化MPU6050。之后,你可以使用MPU6050.getRotationX()、MPU6050.getRotationY()和MPU6050.getRotationZ()函数来获取陀螺仪的偏航、俯仰和横滚值。
一旦你成功获取了陀螺仪的数据,你可以将其用于你的机器人项目中。例如,你可以根据陀螺仪的偏航值来控制机器人的方向,根据俯仰值来控制机器人的倾斜角度,根据横滚值来控制机器人的平衡。
在你的项目中,你可以使用Arduino的PWM输出来控制机器人的电机或舵机。根据陀螺仪的数据,你可以调整PWM输出的占空比,以实现所需的运动控制。
此外,你还可以使用其他传感器和模块来增强你的机器人项目。例如,你可以添加超声波传感器来实现避障功能,添加红外线传感器来实现跟随功能,或者添加无线通信模块来实现远程控制。
总结起来,使用MPU6050 IMU和Arduino机器人可以实现一个简单而有趣的项目。通过获取陀螺仪的数据并将其用于控制机器人的运动,你可以轻松地进行操作并为自己省去很多麻烦。希望这个解决方案对你有帮助!
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
udd4479
所在区域: 全国
udd4479是一家专注于工业领域的科技公司。我们擅长人脸识别、人工智能、数字电源、服务器、无线充电、边缘计算、工业物联网等领域。我们提供多种解决方案,包括基于算丰SOPHON BM1880模块和ON AR0130 AR0230 USB双目人脸识别方案、基于ON Semi NCP1239的服务器辅助电源方案、基于ST STWBC-MC的15W无线充电方案等。我们的产品广泛应用于智能家居、智能楼宇、安防系统、工业网关、智能锁等领域。我们的解决方案以高效、稳定、安全为特点,得到了众多客户的认可和信赖。我们的团队拥有丰富的经验和专业知识,致力于为客户提供最优质的产品和服务。无论是在人脸识别、物联网、充电器方案还是其他领域,udd4479都是您可靠的合作伙伴。