淹死的大白鲨
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
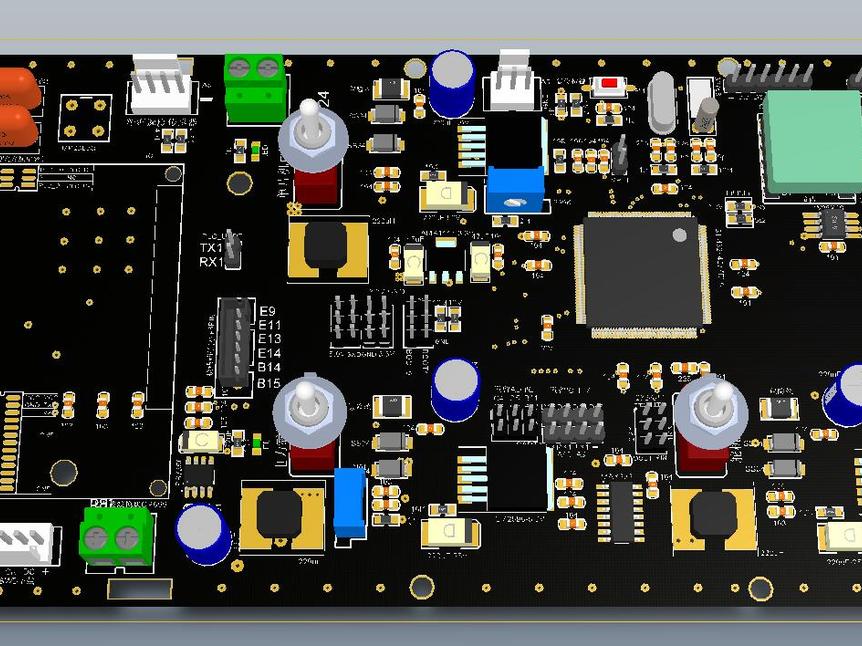
我们的解决方案是基于STM32的有缆型水下机器人电路方案。通过电力载波模块与岸上通信,并通过同轴线进行视频传输。方案包括LED指示灯、蜂鸣器、外扩Flash芯片、USART接口、9轴模块、电源总控制继电器、LM25696 BUCK电源、推进器接口、云台接口和深度传感器。通过这些设备和方案,我们可以实现水下环境的探测和监测,以及对水下任务的执行和控制。
我们的解决方案是基于STM32的有缆型水下机器人电路方案。该方案通过电力载波模块与岸上进行通信,并通过同轴线进行视频传输。
在这个方案中,我们使用了多种设备来实现机器人的功能。首先,我们使用指示灯LED和蜂鸣器来提供机器人的状态指示和警报功能。外扩Flash芯片W25Q128用于存储机器人的数据和程序。USART接口用于与其他设备进行串行通信。
为了实现机器人的导航和姿态控制,我们使用了9轴模块。这个模块可以提供机器人的加速度、陀螺仪和磁力计数据,从而实现姿态的测量和控制。
为了实现机器人的电源管理,我们使用了电源总控制继电器和LM25696 BUCK电源。电源总控制继电器可以控制机器人的电源开关,而LM25696 BUCK电源可以提供稳定的电压和电流给机器人的各个部件。
为了实现机器人的推进和运动控制,我们使用了推进器接口和云台接口。推进器接口可以控制机器人的推进器,从而实现机器人的前进、后退和转向。云台接口可以控制机器人的云台,从而实现机器人的摄像头的方向控制。
最后,为了实现机器人的深度测量,我们使用了深度传感器。这个传感器可以测量机器人的深度,并将数据传输给控制系统进行处理。
通过以上的设备和方案,我们可以实现基于STM32的有缆型水下机器人的电路方案。这个方案可以通过电力载波模块与岸上进行通信,并通过同轴线进行视频传输。这样,我们可以实现对水下环境的探测和监测,以及对水下任务的执行和控制。
在这个方案中,我们使用了多种设备来实现机器人的功能。首先,我们使用指示灯LED和蜂鸣器来提供机器人的状态指示和警报功能。外扩Flash芯片W25Q128用于存储机器人的数据和程序。USART接口用于与其他设备进行串行通信。
为了实现机器人的导航和姿态控制,我们使用了9轴模块。这个模块可以提供机器人的加速度、陀螺仪和磁力计数据,从而实现姿态的测量和控制。
为了实现机器人的电源管理,我们使用了电源总控制继电器和LM25696 BUCK电源。电源总控制继电器可以控制机器人的电源开关,而LM25696 BUCK电源可以提供稳定的电压和电流给机器人的各个部件。
为了实现机器人的推进和运动控制,我们使用了推进器接口和云台接口。推进器接口可以控制机器人的推进器,从而实现机器人的前进、后退和转向。云台接口可以控制机器人的云台,从而实现机器人的摄像头的方向控制。
最后,为了实现机器人的深度测量,我们使用了深度传感器。这个传感器可以测量机器人的深度,并将数据传输给控制系统进行处理。
通过以上的设备和方案,我们可以实现基于STM32的有缆型水下机器人的电路方案。这个方案可以通过电力载波模块与岸上进行通信,并通过同轴线进行视频传输。这样,我们可以实现对水下环境的探测和监测,以及对水下任务的执行和控制。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
淹死的大白鲨
所在区域: 全国
淹死的大白鲨是一家专注于工业领域的技术公司。我们擅长编解码、单片机、深度传感器、自动化控制等领域。我们提供全系列封装库、摇杆控制器、实时时钟电路等产品和解决方案。
在硬件设计方面,我们提供了多种方案,如双4相步进电机驱动设计方案、NanoPi NEO Core 多功能扩展底板、STM32F407功能核心控制板等。这些方案包含了完整的原理图、PCB设计和驱动代码,能够满足不同项目的需求。
此外,我们还开发了一系列基于不同芯片的电路方案,如CP2102 USB转UART转换板、高精度深度传感器MS5837、基于STM32的水下机器人主板等。这些方案结合了先进的技术和实际应用需求,能够帮助客户实现各种工业控制和智能化应用。
我们的产品和解决方案已经在多个项目中得到了成功应用。例如,我们设计的纸张计数显示装置电路方案在2019年电赛中获得了好评,基于OpenMV的STM32追球小车也受到了用户的喜爱。
淹死的大白鲨致力于为客户提供高质量的技术支持和解决方案,帮助他们实现工业自动化和智能化的目标。我们的团队拥有丰富的经验和专业知识,能够根据客户的需求进行定制化开发。无论是工业安全、智能家电还是其他领域,我们都能够为客户提供最佳的解决方案。