longgyue
所在地区:
北京-
首页
服务/硬件产品
行业解决方案
案例
方案概述:
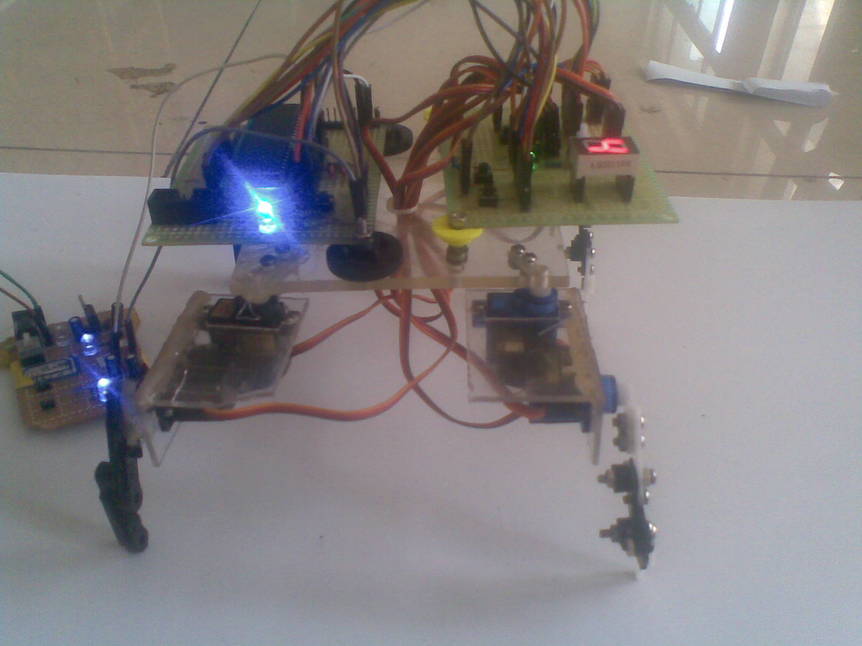
四足爬行机器人的设计和制作需要考虑硬件、软件和制作流程。选择合适的硬件组件,如主控制芯片、电机和传感器。编写控制代码实现机器人的运动和行为。按照设计要求组装硬件部件,并连接电路。测试机器人功能,进行调试和优化。通过合理选择和组合这些要素,打造功能强大、稳定可靠的四足爬行机器人。
为了实现四足爬行机器人的设计和制作,我们需要考虑硬件、软件和制作流程。首先,我们需要选择合适的硬件组件来构建机器人的身体结构和运动系统。这包括电机、传感器、主控制芯片等。
在硬件方面,我们可以选择使用ATmega16-16PC作为主控制芯片。这款芯片具有强大的处理能力和丰富的接口,可以满足机器人的控制需求。同时,我们还需要选择合适的电机来驱动机器人的四条腿,以及其他必要的传感器来感知环境和实现机器人的导航功能。
在软件方面,我们需要编写控制代码来实现机器人的运动和行为。这包括控制机器人的步态、姿态调整、避障等功能。我们可以使用C语言或其他适合的编程语言来编写控制代码,并通过与主控制芯片的通信接口将代码加载到芯片中。
制作流程方面,我们需要按照设计要求来组装机器人的硬件部件,并连接好电路。在组装过程中,需要注意安装位置和方向的准确性,以确保机器人能够正常运行。完成组装后,我们可以通过连接电源和控制设备来测试机器人的功能,并进行必要的调试和优化。
总结起来,四足爬行机器人的设计和制作涉及到硬件的选择和组装、软件的编写和加载,以及制作流程的实施。通过合理的选择和组合这些要素,我们可以打造出一个功能强大、稳定可靠的四足爬行机器人。
在硬件方面,我们可以选择使用ATmega16-16PC作为主控制芯片。这款芯片具有强大的处理能力和丰富的接口,可以满足机器人的控制需求。同时,我们还需要选择合适的电机来驱动机器人的四条腿,以及其他必要的传感器来感知环境和实现机器人的导航功能。
在软件方面,我们需要编写控制代码来实现机器人的运动和行为。这包括控制机器人的步态、姿态调整、避障等功能。我们可以使用C语言或其他适合的编程语言来编写控制代码,并通过与主控制芯片的通信接口将代码加载到芯片中。
制作流程方面,我们需要按照设计要求来组装机器人的硬件部件,并连接好电路。在组装过程中,需要注意安装位置和方向的准确性,以确保机器人能够正常运行。完成组装后,我们可以通过连接电源和控制设备来测试机器人的功能,并进行必要的调试和优化。
总结起来,四足爬行机器人的设计和制作涉及到硬件的选择和组装、软件的编写和加载,以及制作流程的实施。通过合理的选择和组合这些要素,我们可以打造出一个功能强大、稳定可靠的四足爬行机器人。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
longgyue
所在区域: 北京-
公司简介:
Longgyue是一家专注于机器人、单片机和工业安全领域的公司。我们拥有丰富的经验和专业知识,致力于为客户提供高质量的产品和解决方案。
在机器人领域,我们擅长开发四足机器人控制代码和原理图,为客户提供完整的四足机器人解决方案。我们还提供微型四轴飞行器参考电路和四足爬行机器人的下载,包括硬件、软件和制作流程,帮助客户快速实现他们的机器人项目。
在单片机领域,我们提供诺基亚5110显示屏转接板及软件驱动程序,以及SD卡读取文件并在TFT显示的解决方案。我们的电路设计方案能够满足客户的需求,并提供高效可靠的解决方案。
此外,我们还提供工业安全方面的服务,帮助客户确保工业设备和系统的安全性。我们的专业团队能够为客户提供全面的工业安全解决方案,保护客户的资产和数据安全。
Longgyue致力于为客户提供最佳的产品和解决方案,我们的团队将竭诚为您服务。如果您有任何关于机器人、单片机或工业安全方面的需求,请随时与我们联系。