wujingyu2015
所在地区:
北京-
首页
服务/硬件产品
行业解决方案
案例
方案概述:
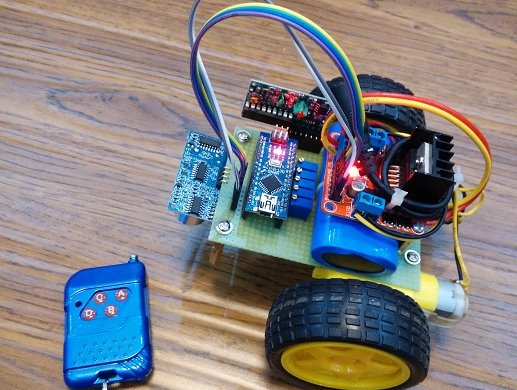
本方案采用超声波测距模块作为小车平衡状态的检测,免去了对加速度、陀螺仪传感器的理解和复杂处理算法。小车的平衡控制仍然采用Arduino开源硬件,再加上电机驱动模块,电机采用TT马达。通过电位器调整平衡参数,不使用蓝牙无线模块或有线串口在线调整参数。硬件设计方面,采用Arduino Nano为核心控制模块,HC-SR04超声波测距模块,L298N电机驱动模块,供电采用7.4V/2200mAh锂电池。附件包含设计文档、器件采购清单、程序和调试助手程序。实现DIY超声波测距平衡小车,简化了传感器的使用和复杂算法的处理,降低了成本,提供了参数调整的便利性。
解决方案:
本方案采用超声波测距模块作为小车平衡状态的检测,免去了对加速度、陀螺仪传感器的理解和复杂处理算法。小车的平衡控制仍然采用网络上流行的Arduino开源硬件,再加上电机驱动模块 L298N,电机仍然采用TT马达(香蕉电机)。
为了降低成本,本方案采用电位器调整设定小车的平衡参数,不使用蓝牙无线模块或有线串口在线调整参数。
硬件设计方面,本方案以Arduino Nano为核心控制模块,采用HC-SR04超声波测距模块,L298N电机驱动模块,供电采用7.4V/2200mAh锂电池。同时,三个10K电位器分别用于平衡点设置、PD算法中Kp和Kd系数设置的调整。
在实际应用中,本方案利用PWM的输出值近似计算出车速,并通过速度PD计算出平衡距离修订值,从而实现小车的速度给定。与用速度PD计算出PWM修订值不同,本方案可以在变化的坡度上实现超声自平衡小车的平衡。
附件内容包含超声波测距平衡小车设计文档、超声波测距平衡小车器件采购清单、超声自平衡小车程序和串口调试助手程序。
通过以上方案,您可以实现一个DIY超声波测距平衡小车,采用Arduino Nano控制模块,简化了传感器的使用和复杂算法的处理,降低了成本,同时提供了调整参数的便利性。
本方案采用超声波测距模块作为小车平衡状态的检测,免去了对加速度、陀螺仪传感器的理解和复杂处理算法。小车的平衡控制仍然采用网络上流行的Arduino开源硬件,再加上电机驱动模块 L298N,电机仍然采用TT马达(香蕉电机)。
为了降低成本,本方案采用电位器调整设定小车的平衡参数,不使用蓝牙无线模块或有线串口在线调整参数。
硬件设计方面,本方案以Arduino Nano为核心控制模块,采用HC-SR04超声波测距模块,L298N电机驱动模块,供电采用7.4V/2200mAh锂电池。同时,三个10K电位器分别用于平衡点设置、PD算法中Kp和Kd系数设置的调整。
在实际应用中,本方案利用PWM的输出值近似计算出车速,并通过速度PD计算出平衡距离修订值,从而实现小车的速度给定。与用速度PD计算出PWM修订值不同,本方案可以在变化的坡度上实现超声自平衡小车的平衡。
附件内容包含超声波测距平衡小车设计文档、超声波测距平衡小车器件采购清单、超声自平衡小车程序和串口调试助手程序。
通过以上方案,您可以实现一个DIY超声波测距平衡小车,采用Arduino Nano控制模块,简化了传感器的使用和复杂算法的处理,降低了成本,同时提供了调整参数的便利性。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
wujingyu2015
所在区域: 北京-
wujingyu2015是一家专注于自动化控制领域的公司。我们擅长于开发各类自动化控制系统,并提供相关解决方案。我们的核心能力在于设计和制造DIY超声波测距平衡小车,该小车采用了开源的Arduino Nano控制模块,具有高精度的测距功能和平衡控制能力。
作为一家专业的自动化控制公司,我们致力于为客户提供高质量的产品和解决方案。我们的团队拥有丰富的经验和专业知识,能够根据客户的需求定制化设计和制造各类自动化控制系统。我们的产品广泛应用于工业生产线、仓储物流、智能家居等领域,为客户提供了高效、智能的解决方案。
我们的解决方案不仅具有高性能和稳定性,还具备灵活性和可扩展性。我们可以根据客户的需求进行定制化设计,满足不同行业和应用场景的要求。我们的解决方案已经在多个项目中得到了验证,并取得了良好的效果。
作为一家专业的自动化控制公司,我们始终秉承着“客户至上、质量第一”的原则,为客户提供优质的产品和服务。我们将继续努力创新,不断提升自身的技术实力和服务水平,为客户创造更大的价值。如果您对我们的产品和解决方案感兴趣,欢迎随时联系我们,我们将竭诚为您服务。