854426554
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
我们提供了一个解决方案,以满足3D打印5自由度机器人手臂STL文件开源的需求。该项目是一个由某国外开源的机器人手臂,具有5个自由度,并可通过3D打印制造。机器人手臂由ROS提供动力,具有500克的提升能力。该项目旨在为全球的3D制造商和学校提供机器人手臂设计,而不依赖于仿真软件。所有STL文件均为开源,可在附件中下载。该机器人手臂的直立位置约为700mm,可举起重达500克的物体。通过开源的STL文件和ROS的支持,用户可以根据需求进行定制和改进。这个项目旨在推动机器人技术的发展和应用,为工业领域带来更多创新和效率提升。
我们提供了一个解决方案,以满足标题中提到的“3D打印 5自由度机器人手臂 STL文件开源”的需求。这个项目是一个由某国外开源的机器人手臂,它具有5个自由度,并且可以通过3D打印来制造。该机器人手臂由ROS(机器人操作系统)提供动力,并且具有500克的提升能力。
该项目的主要目的是为世界各地的3D制造商和学校提供一个机器人手臂的设计,而不是依赖于仿真软件。所有的STL文件都是开源的,可以在附件中进行下载。
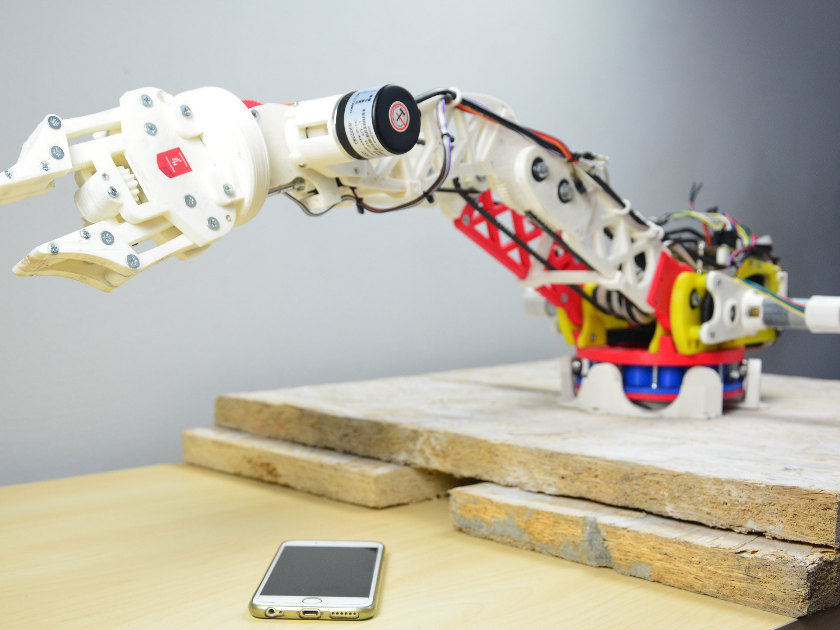
这个机器人手臂的直立位置大约为700mm,可以举起重达500克的物体。在开发过程中,我们有一些关键的想法和要求。首先,最终的原型必须是开放源代码的,这样其他人可以根据自己的需求进行修改和改进。其次,机器人手臂的身体大部分部件都可以通过3D打印机制作,这样可以降低制造成本并提高灵活性。此外,机器人手臂需要足够强大的力气,能够举起重达500克的物体。最后,机器人手臂由ROS提供支持,这将为用户提供一个强大而灵活的控制系统。
附件中提供了机器人手臂的实物截图和STL文件的截图,您可以通过下载附件来获取更多详细信息。
这个开源的3D打印五自由度机器人手臂项目将为制造商和学校提供一个灵活、低成本的机器人手臂解决方案。通过使用开源的STL文件和ROS的支持,用户可以根据自己的需求进行定制和改进。这个项目的目标是促进机器人技术的发展和应用,为工业领域带来更多的创新和效率提升。
该项目的主要目的是为世界各地的3D制造商和学校提供一个机器人手臂的设计,而不是依赖于仿真软件。所有的STL文件都是开源的,可以在附件中进行下载。
这个机器人手臂的直立位置大约为700mm,可以举起重达500克的物体。在开发过程中,我们有一些关键的想法和要求。首先,最终的原型必须是开放源代码的,这样其他人可以根据自己的需求进行修改和改进。其次,机器人手臂的身体大部分部件都可以通过3D打印机制作,这样可以降低制造成本并提高灵活性。此外,机器人手臂需要足够强大的力气,能够举起重达500克的物体。最后,机器人手臂由ROS提供支持,这将为用户提供一个强大而灵活的控制系统。
附件中提供了机器人手臂的实物截图和STL文件的截图,您可以通过下载附件来获取更多详细信息。
这个开源的3D打印五自由度机器人手臂项目将为制造商和学校提供一个灵活、低成本的机器人手臂解决方案。通过使用开源的STL文件和ROS的支持,用户可以根据自己的需求进行定制和改进。这个项目的目标是促进机器人技术的发展和应用,为工业领域带来更多的创新和效率提升。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
854426554
所在区域: 全国
公司简介:
854426554是一家专注于物联网、音频采集、以太网等领域的技术公司。我们擅长于提供各种物联网解决方案,包括ESP8266电路、PCB源文件、AM3354、MSGEQ7等技术支持。我们的产品涵盖音频分析、电流监控器、超声波定位、电导率计等多个领域。我们还提供直流有刷电机控制器、Arduino教程、智能云等相关产品和服务。
我们的解决方案包括基于STM32的EasyIOT 2G物联网开发板、AM3354底板、MSGEQ7音频分析demo程序等。我们还分享了W5500以太网主控器设计、TB6612FNG四路直流电机驱动板设计、电能监控器设计等资料。此外,我们还提供了3D打印机器人手臂STL文件、TPYBoardv102温湿度检测及LCD显示方案、STM32F407最小系统板PCB文件等资源。
我们的产品和解决方案得到了广泛的应用,包括智能家居控制、工业安全、自动化控制等领域。我们致力于为客户提供高质量的技术支持和解决方案,帮助他们实现数字化转型和创新发展。
如果您对我们的产品和解决方案感兴趣,欢迎联系我们,我们将竭诚为您提供专业的服务。