niceshy
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
该解决方案提供了关于两轮自平衡小车的硬件设计和设计分析。硬件设计包括控制器、加速度传感器、陀螺仪、传感器融合、马达和驱动板芯片等组件。设计分析介绍了控制方法和注意事项,以及电机选取建议和算法选择。附件中提供了设计资料和Matlab建模资料供进一步实施和调试。
解决方案:
根据标题“两轮自平衡小车(全部设计资料+设计分析)”,该解决方案是关于自平衡小车的硬件设计和设计分析。
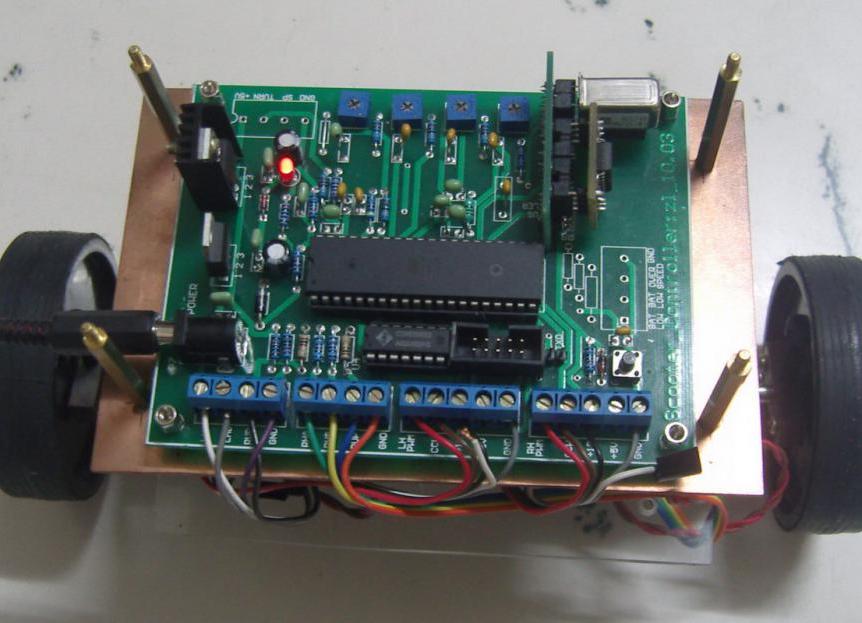
硬件设计概述:
该自平衡小车的硬件设计包括以下组件:
- 控制器:ATmega16,主频8MHz。
- 加速度传感器:MMA2260。
- 陀螺仪:EWTS82。
- 传感器融合:采用卡尔曼滤波算法。
- 马达:EN_2342CR,速比64,配备双路12脉冲编码器。
- 驱动板芯片:CD4001+IR2111+IRF1404,具备较大的驱动电流能力。
设计分析:
该自平衡小车的控制方法相对简单,主要包括以下步骤:
1. 利用定时器产生10ms的中断,每次中断执行以下工作:
- 对加速度传感器和陀螺仪进行AD采样,并通过卡尔曼滤波算法得出角度和角速度。
- 计算车轮的速度,并通过积分得出位置。
- 利用PD算法计算PWM值,其中PWM值的计算公式为:PWM = K1 * angle + K2 * angle_dot + K3 * speed + K4 * position。
- 根据给定的参考速度计算前进或后退的PWM值。
注意事项:
- 通过增量式轮速传感器的A相中断,读取B相电位来判断前进或后退,并在10ms的时间内进行累加,以计算车轮的速度。
- 由于10ms累加的轮速信号较少,直接计算车体会出现抖动的问题,因此增加了低通滤波来解决这个问题。
- 外部增加了4个电位器,可以手动调节4个K值,以方便调试。
- 附件中的文件夹包含了使用Matlab建模的资料,可以求解出所需的4个K值,供大家自行调试和观察对车辆的影响。
电机选取建议:
- 考虑到减速器和传感器的因素,建议选择带有较大扭矩和功率的电机。
- 转动惯量较大的电机可能会更稳定,因此可以选择不带空心杯的电机。
- 适当增大减速比,并选择较大的轮子。
购买的电机型号参考:
- 根据以上建议,可以参考购买适合的电机型号。
算法:
- 常用的计算方法有互补滤波和卡尔曼滤波,两者都可以输出校正后的角度和角速度。
- 在该解决方案中,采用了卡尔曼滤波算法,并对其进行了精简以适应单片机的运算能力。
- 关于卡尔曼滤波算法的详细资料可以参考附件内容。
以上是关于“两轮自平衡小车(全部设计资料+设计分析)”的解决方案。如有需要,可以参考附件中的设计资料和附带的Matlab建模资料进行进一步的实施和调试。
根据标题“两轮自平衡小车(全部设计资料+设计分析)”,该解决方案是关于自平衡小车的硬件设计和设计分析。
硬件设计概述:
该自平衡小车的硬件设计包括以下组件:
- 控制器:ATmega16,主频8MHz。
- 加速度传感器:MMA2260。
- 陀螺仪:EWTS82。
- 传感器融合:采用卡尔曼滤波算法。
- 马达:EN_2342CR,速比64,配备双路12脉冲编码器。
- 驱动板芯片:CD4001+IR2111+IRF1404,具备较大的驱动电流能力。
设计分析:
该自平衡小车的控制方法相对简单,主要包括以下步骤:
1. 利用定时器产生10ms的中断,每次中断执行以下工作:
- 对加速度传感器和陀螺仪进行AD采样,并通过卡尔曼滤波算法得出角度和角速度。
- 计算车轮的速度,并通过积分得出位置。
- 利用PD算法计算PWM值,其中PWM值的计算公式为:PWM = K1 * angle + K2 * angle_dot + K3 * speed + K4 * position。
- 根据给定的参考速度计算前进或后退的PWM值。
注意事项:
- 通过增量式轮速传感器的A相中断,读取B相电位来判断前进或后退,并在10ms的时间内进行累加,以计算车轮的速度。
- 由于10ms累加的轮速信号较少,直接计算车体会出现抖动的问题,因此增加了低通滤波来解决这个问题。
- 外部增加了4个电位器,可以手动调节4个K值,以方便调试。
- 附件中的文件夹包含了使用Matlab建模的资料,可以求解出所需的4个K值,供大家自行调试和观察对车辆的影响。
电机选取建议:
- 考虑到减速器和传感器的因素,建议选择带有较大扭矩和功率的电机。
- 转动惯量较大的电机可能会更稳定,因此可以选择不带空心杯的电机。
- 适当增大减速比,并选择较大的轮子。
购买的电机型号参考:
- 根据以上建议,可以参考购买适合的电机型号。
算法:
- 常用的计算方法有互补滤波和卡尔曼滤波,两者都可以输出校正后的角度和角速度。
- 在该解决方案中,采用了卡尔曼滤波算法,并对其进行了精简以适应单片机的运算能力。
- 关于卡尔曼滤波算法的详细资料可以参考附件内容。
以上是关于“两轮自平衡小车(全部设计资料+设计分析)”的解决方案。如有需要,可以参考附件中的设计资料和附带的Matlab建模资料进行进一步的实施和调试。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
niceshy
所在区域: 全国
公司简介:
Niceshy是一家专注于工业领域的技术公司。我们擅长触摸传感器、安防系统设计、51单片机、USB通信等领域。我们提供多种产品和解决方案,包括智能衣柜、心率监测系统、超声波测距电路等。我们的产品设计和解决方案基于先进的技术和创新的思维,旨在为客户提供高性能、可靠的解决方案。
在硬件设计方面,我们拥有丰富的经验和专业的团队,可以提供各种电路设计和原理图,如LTC3810同步开关式稳压器、CJQ4435 MOSFET继电器控制模块、ESP-Prog下载与调试器等。此外,我们还提供相应的软件源码和仿真电路,以满足客户的需求。
我们的产品和解决方案已经在多个行业得到广泛应用,并取得了良好的效果。我们的客户包括各类企业和机构,他们对我们的产品和服务给予了高度评价。
作为一家技术公司,我们始终致力于为客户提供最好的解决方案。我们不断研发新技术,提升产品性能,以满足客户不断变化的需求。我们的目标是成为工业领域的领先者,为客户创造更大的价值。
如果您对我们的产品和解决方案感兴趣,欢迎随时联系我们,我们将竭诚为您服务。