rfgdgf
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
我们基于Arduino Nano和PID算法成功实现了一个旋转倒立摆的解决方案。通过使用外部中断采集编码器数据,计算摆杆角度,并通过PWM控制电机转动。我们希望这个解决方案能为对倒立摆感兴趣的人提供参考和启发。附件中包含了控制代码和PID库,欢迎下载并参考。如有任何问题或需要支持,请随时联系我们。
我们基于标题内容,为您提供以下工业领域的解决方案:
在这个项目中,我们使用Arduino Nano作为主控,通过使用PID算法和Arduino的PID库,成功实现了一个旋转倒立摆。虽然在制作过程中遇到了一些挑战,但是通过不断的努力和学习,我们的团队成功地完成了这个电赛题目。
倒立摆是一个非线性、多阶、多输入的自动控制模型,被广泛应用于各大高校实验室用于测试自动控制算法。尽管我们的团队在算法和数学建模方面的知识有限,但是我们成功地应用了简单的PID算法,并直接调用了Arduino的PID库。
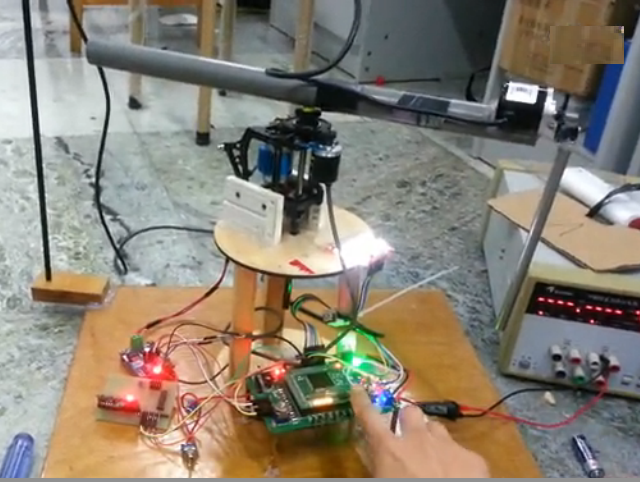
在这个项目中,我们使用了Arduino Nano的两个外部中断来采集编码器的数据,并通过中断数量计算摆杆的角度。摆杆角度与垂直的差值被作为PID算法的输入,经过主控计算后,通过PWM控制L298驱动直流减速电机的转动。
以下是我们在这个项目中使用的材料列表:
1. 主控Arduino Nano一块
2. Nano扩展板,自制腐蚀PCB一块
3. 自制腐蚀PCB电机驱动L298一块
4. 欧姆龙高精度旋转编码器(2000线)+编码器滤波放大电路板各一个
5. 直流减速电机一个
6. 12V直流电源一个
7. 碳纤维棒、木板、电源线若干
通过这个项目,我们的团队不仅成功地完成了电赛题目,还在制作过程中学到了许多宝贵的经验和知识。我们希望这个解决方案能够对对倒立摆感兴趣的人提供一些参考和启发。
附件中包含了旋转倒立摆控制代码和PID库,您可以下载并参考这些代码来进一步了解和实践倒立摆控制。
希望这个解决方案能够对您有所帮助,如果您有任何问题或需要进一步的支持,请随时与我们联系。
在这个项目中,我们使用Arduino Nano作为主控,通过使用PID算法和Arduino的PID库,成功实现了一个旋转倒立摆。虽然在制作过程中遇到了一些挑战,但是通过不断的努力和学习,我们的团队成功地完成了这个电赛题目。
倒立摆是一个非线性、多阶、多输入的自动控制模型,被广泛应用于各大高校实验室用于测试自动控制算法。尽管我们的团队在算法和数学建模方面的知识有限,但是我们成功地应用了简单的PID算法,并直接调用了Arduino的PID库。
在这个项目中,我们使用了Arduino Nano的两个外部中断来采集编码器的数据,并通过中断数量计算摆杆的角度。摆杆角度与垂直的差值被作为PID算法的输入,经过主控计算后,通过PWM控制L298驱动直流减速电机的转动。
以下是我们在这个项目中使用的材料列表:
1. 主控Arduino Nano一块
2. Nano扩展板,自制腐蚀PCB一块
3. 自制腐蚀PCB电机驱动L298一块
4. 欧姆龙高精度旋转编码器(2000线)+编码器滤波放大电路板各一个
5. 直流减速电机一个
6. 12V直流电源一个
7. 碳纤维棒、木板、电源线若干
通过这个项目,我们的团队不仅成功地完成了电赛题目,还在制作过程中学到了许多宝贵的经验和知识。我们希望这个解决方案能够对对倒立摆感兴趣的人提供一些参考和启发。
附件中包含了旋转倒立摆控制代码和PID库,您可以下载并参考这些代码来进一步了解和实践倒立摆控制。
希望这个解决方案能够对您有所帮助,如果您有任何问题或需要进一步的支持,请随时与我们联系。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
rfgdgf
所在区域: 全国
公司简介:
rfgdgf是一家专注于工业领域的技术公司。我们擅长于温度控制系统、单片机、智能车、蓝牙控制、传感器、以太网等领域的研发和应用。我们提供多种解决方案,包括带JTAG的AVR-HX128A1开发板电路图及示例代码、苹果8无线快充发射端、接收端解决方案、高通GT 12W智能快速充电器解决方案等。我们还提供ADI ADSP-BF533核心板PCB及电路图参考设计、温度控制系统的设计方案与软硬件实现等服务。
我们的产品和解决方案广泛应用于工业自动化控制、智能家居控制、智能家电等领域。我们的团队拥有丰富的经验和专业知识,能够为客户提供高质量的技术支持和解决方案。
我们的目标是为客户提供创新的技术和可靠的产品,帮助他们提高生产效率、降低成本、提升竞争力。我们致力于与客户建立长期合作关系,共同发展和成长。
如果您对我们的产品和解决方案感兴趣,欢迎联系我们,我们将竭诚为您提供优质的服务。