yueyun
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
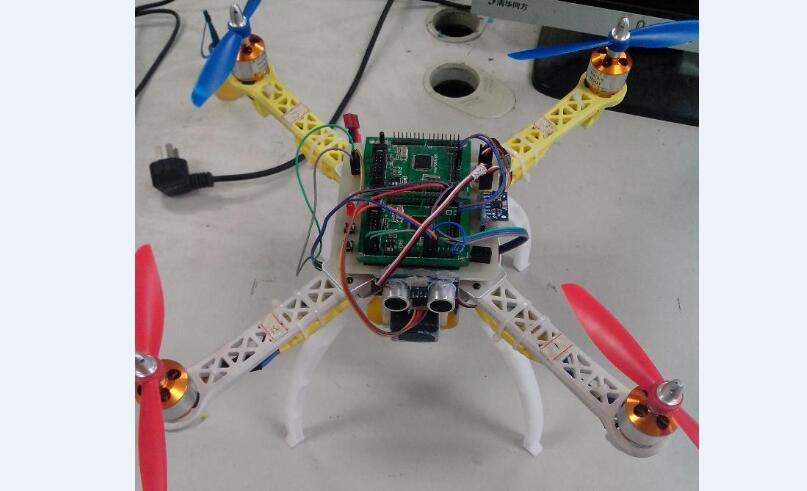
我们提供的解决方案是基于电子设计竞赛A题(TI杯)作品的开源分享四旋翼飞行器源代码。我们建议采用msp430f149作为飞控,并结合另一块芯片来实现姿态控制和任务执行。硬件方面,我们使用空心杯电机和11.1V航模电池,采用两块msp430f149最小系统作为飞控板,陀螺仪采用MPU9150(九轴),姿态控制算法采用PID。我们还提供了四旋翼飞行器简易遥控器制作的附件资料。请注意,此资料为免费分享,不提供技术支持。如有需要,请随时联系我们。
我们提供的解决方案是基于标题【电子设计竞赛A题(TI杯)作品】开源分享四旋翼飞行器源代码。根据提供的内容,我们建议采用msp430f149作为飞控,并结合另一块芯片来实现姿态控制和任务执行。以下是我们的解决方案:
硬件介绍:
- 采用空心杯电机(2000转/min)和11.1V航模电池。
- 使用两块msp430f149最小系统作为飞控板,其中一块用于姿态控制,另一块用于完成题目要求,两者通过串口通信。
- 陀螺仪采用MPU9150(九轴),自带地磁传感器,无需额外添加地磁传感器。
- 数据融合通过MPU9150的内部DMP处理输出,针对430的时钟频率对程序进行了调整。
- 姿态控制算法采用PID。
我们还提供了以下附件资料:
- 配套四旋翼飞行器简易遥控器制作。
请注意,此资料为卖家免费分享,不提供技术支持。在使用前,请验证资料的正确性。如果涉及版权问题,请联系管理员删除。
以上是我们的解决方案,希望对您有所帮助。如果您有任何问题或需要进一步的支持,请随时与我们联系。
硬件介绍:
- 采用空心杯电机(2000转/min)和11.1V航模电池。
- 使用两块msp430f149最小系统作为飞控板,其中一块用于姿态控制,另一块用于完成题目要求,两者通过串口通信。
- 陀螺仪采用MPU9150(九轴),自带地磁传感器,无需额外添加地磁传感器。
- 数据融合通过MPU9150的内部DMP处理输出,针对430的时钟频率对程序进行了调整。
- 姿态控制算法采用PID。
我们还提供了以下附件资料:
- 配套四旋翼飞行器简易遥控器制作。
请注意,此资料为卖家免费分享,不提供技术支持。在使用前,请验证资料的正确性。如果涉及版权问题,请联系管理员删除。
以上是我们的解决方案,希望对您有所帮助。如果您有任何问题或需要进一步的支持,请随时与我们联系。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
yueyun
所在区域: 全国
Yueyun是一家专注于电子设计和工业安全领域的公司。我们擅长于电子设计、电子大赛作品、飞行器遥控器等方面。我们提供多种解决方案,包括电子设计竞赛作品的设计资料和源代码,以及易于操作的DC-DC电源设计。我们还开源分享了四旋翼飞行器的源代码,方便广大爱好者学习和使用。作为一家专业的公司,我们致力于为客户提供高质量的产品和解决方案。我们的团队拥有丰富的经验和专业知识,能够满足客户的各种需求。无论是在电子设计领域还是工业安全领域,我们都能够为客户提供最优质的服务。我们的目标是通过创新和技术的应用,为客户创造更大的价值。