沐紫
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
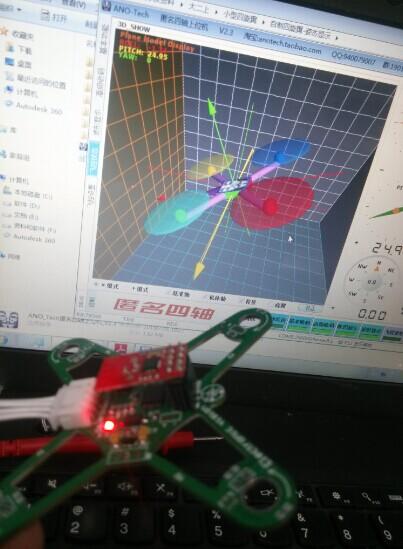
我们提供了一个基于四元数姿态解算算法的小四旋翼飞行控制方案。通过对陀螺仪和加速度计数据的处理和补偿,实现精确的姿态控制。该工程还提供了相关的讲解和代码,方便其他开发者学习和使用。
针对标题“开源一个自己做的小四旋翼工程,会有相关讲解”,我们提供以下解决方案。
在这个工程中,我们使用了四元数姿态解算算法来实现小四旋翼的姿态控制。该算法通过陀螺仪和加速度计的数据,计算出飞行器的姿态角(俯仰角、横滚角和偏航角),从而实现精确的飞行控制。
首先,我们需要将陀螺仪和加速度计的原始数据进行预处理。通过对加速度计数据进行归一化,我们可以得到一个单位向量,表示飞行器的加速度方向。然后,我们使用四元数的微分方程,将陀螺仪的角速度与误差进行补偿,得到更新后的四元数。
接下来,我们对四元数进行规范化,确保其模长为1,以表示刚体旋转。然后,我们可以使用自带库函数,根据四元数计算出俯仰角和横滚角。这些角度可以用于飞行器的控制和导航。
在整个过程中,我们还需要注意陀螺仪的零点漂移问题。通过对陀螺仪数据进行补偿,可以减小零点漂移对姿态解算的影响。
总结起来,这个开源工程提供了一个基于四元数姿态解算算法的小四旋翼飞行控制方案。通过对陀螺仪和加速度计数据的处理和补偿,可以实现精确的姿态控制。这个工程还提供了相关的讲解和代码,方便其他开发者学习和使用。
希望以上解决方案对您有所帮助。如果您有任何其他问题或需求,请随时告诉我们。
在这个工程中,我们使用了四元数姿态解算算法来实现小四旋翼的姿态控制。该算法通过陀螺仪和加速度计的数据,计算出飞行器的姿态角(俯仰角、横滚角和偏航角),从而实现精确的飞行控制。
首先,我们需要将陀螺仪和加速度计的原始数据进行预处理。通过对加速度计数据进行归一化,我们可以得到一个单位向量,表示飞行器的加速度方向。然后,我们使用四元数的微分方程,将陀螺仪的角速度与误差进行补偿,得到更新后的四元数。
接下来,我们对四元数进行规范化,确保其模长为1,以表示刚体旋转。然后,我们可以使用自带库函数,根据四元数计算出俯仰角和横滚角。这些角度可以用于飞行器的控制和导航。
在整个过程中,我们还需要注意陀螺仪的零点漂移问题。通过对陀螺仪数据进行补偿,可以减小零点漂移对姿态解算的影响。
总结起来,这个开源工程提供了一个基于四元数姿态解算算法的小四旋翼飞行控制方案。通过对陀螺仪和加速度计数据的处理和补偿,可以实现精确的姿态控制。这个工程还提供了相关的讲解和代码,方便其他开发者学习和使用。
希望以上解决方案对您有所帮助。如果您有任何其他问题或需求,请随时告诉我们。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
沐紫
所在区域: 全国
沐紫是一家专注于无线鼠标和工业安全领域的公司。我们致力于为客户提供高品质的产品和解决方案。
在无线鼠标领域,沐紫拥有丰富的经验和技术实力。我们的团队研发了一系列创新的无线鼠标产品,采用先进的技术和设计理念,为用户提供更加舒适、便捷的操作体验。无论是在办公场景还是游戏领域,沐紫的无线鼠标都能满足用户的需求。
在工业安全领域,沐紫拥有专业的团队和先进的技术。我们提供全方位的工业安全解决方案,帮助客户保护工业设备和数据的安全。无论是网络安全、物理安全还是数据安全,沐紫都能为客户提供可靠的解决方案,帮助他们降低风险并提升生产效率。
除了无线鼠标和工业安全,沐紫还在其他领域有着丰富的经验和能力。我们不断探索创新,开源一些自己做的小四旋翼工程,并提供相关讲解。此外,我们还开源了一款由我们制作的空中鼠标,采用了MPU6050+NRF24l01+stm32等先进技术,为用户带来全新的操控体验。
沐紫始终秉承着客户至上的原则,不断追求卓越。我们将继续努力,为客户提供更好的产品和解决方案,为工业领域的发展贡献力量。