wwchen
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
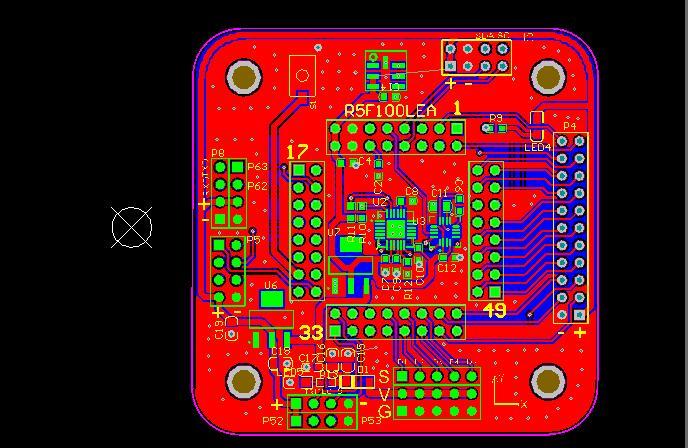
本项目设计了一个多旋翼自主飞行器,使用Renesas的RL78/G13系列R5F100lEA芯片和TI的TM4C123GH6PM芯片作为系统板和飞行控制板。利用超声波测距模块和线性CCD采集飞行器的高度和位置信息,实现飞行控制和姿态校正。通过MPU-9150芯片获取飞行器的姿态数据,并与系统板的数据进行矫正,实现精确控制。利用高度数据进行PID调节,实现定高飞行。利用CCD数据控制飞行器稳定在黑线上方。实现飞行器的转向功能和控制电磁铁的定点吸取和投放铁片的功能。通过持续的硬件维护和软件调试,优化系统性能和稳定性,成功完成国家级电子设计大赛的C题要求。
解决方案:
本项目旨在设计一个多旋翼自主飞行器,以参加国家级电子设计大赛的C题。为了实现这一目标,我们选择了Renesas公司的RL78/G13系列R5F100lEA芯片作为系统板,以及TI公司的TM4C123GH6PM芯片作为飞行控制板。
在系统板方面,我们利用了超声波测距模块和线性CCD来采集飞行器的高度和位置信息。这些数据将用于飞行控制和姿态校正。
飞行控制板上内嵌了MPU-9150芯片,可以获取飞行器的姿态数据。通过将这些数据与系统板采集到的数据进行矫正,我们可以实现飞行器的精确控制。
为了实现定高飞行,我们利用高度数据进行PID调节。通过不断调整飞行器的推力,我们可以使其保持在预设的高度上方飞行。
此外,我们还利用CCD数据来控制飞行器稳定在黑线上方。通过分析CCD数据,我们可以判断飞行器相对于黑线的位置,并相应地调整飞行器的姿态,以保持其在黑线上方的稳定飞行。
另外,我们还实现了飞行器的转向功能,以及控制电磁铁的定点吸取和投放铁片的功能。通过控制电磁铁的开关,我们可以实现飞行器对铁片的吸取和投放,从而完成特定任务。
在整个项目过程中,我们进行了持续的硬件维护和软件调试工作。通过不断优化系统的性能和稳定性,我们在短时间内基本实现了定高飞行、循迹和铁片定点投放等功能。
总体而言,本项目利用了Renesas和TI公司提供的先进芯片技术,结合超声波测距模块和线性CCD等传感器,实现了多旋翼自主飞行器的设计和控制。通过不断的优化和调试,我们成功地完成了国家级电子设计大赛的C题要求。
本项目旨在设计一个多旋翼自主飞行器,以参加国家级电子设计大赛的C题。为了实现这一目标,我们选择了Renesas公司的RL78/G13系列R5F100lEA芯片作为系统板,以及TI公司的TM4C123GH6PM芯片作为飞行控制板。
在系统板方面,我们利用了超声波测距模块和线性CCD来采集飞行器的高度和位置信息。这些数据将用于飞行控制和姿态校正。
飞行控制板上内嵌了MPU-9150芯片,可以获取飞行器的姿态数据。通过将这些数据与系统板采集到的数据进行矫正,我们可以实现飞行器的精确控制。
为了实现定高飞行,我们利用高度数据进行PID调节。通过不断调整飞行器的推力,我们可以使其保持在预设的高度上方飞行。
此外,我们还利用CCD数据来控制飞行器稳定在黑线上方。通过分析CCD数据,我们可以判断飞行器相对于黑线的位置,并相应地调整飞行器的姿态,以保持其在黑线上方的稳定飞行。
另外,我们还实现了飞行器的转向功能,以及控制电磁铁的定点吸取和投放铁片的功能。通过控制电磁铁的开关,我们可以实现飞行器对铁片的吸取和投放,从而完成特定任务。
在整个项目过程中,我们进行了持续的硬件维护和软件调试工作。通过不断优化系统的性能和稳定性,我们在短时间内基本实现了定高飞行、循迹和铁片定点投放等功能。
总体而言,本项目利用了Renesas和TI公司提供的先进芯片技术,结合超声波测距模块和线性CCD等传感器,实现了多旋翼自主飞行器的设计和控制。通过不断的优化和调试,我们成功地完成了国家级电子设计大赛的C题要求。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
wwchen
所在区域: 全国
wwchen是一家专注于智能车、智能手表、安卓等领域的公司。我们擅长于飞思卡尔杯智能车、CCD摄像头、多旋翼自主飞行器、飞行控制、电机模块、诺基亚5110等技术。我们提供多种解决方案,包括参赛作品、竞赛资料、电子设计大赛试题、DIY制作模块以及开源项目等。其中,我们的参赛作品包括STM32+Android实现的智能家政机器人,全国大学生“飞思卡尔”杯智能汽车竞赛摄像头组参赛资料等。我们还提供基于ATmega328设计的智能手表和Arduino控制的弹球机等开源项目。我们致力于为客户提供智能化、自动化的解决方案,满足工业安全、智能家电等领域的需求。